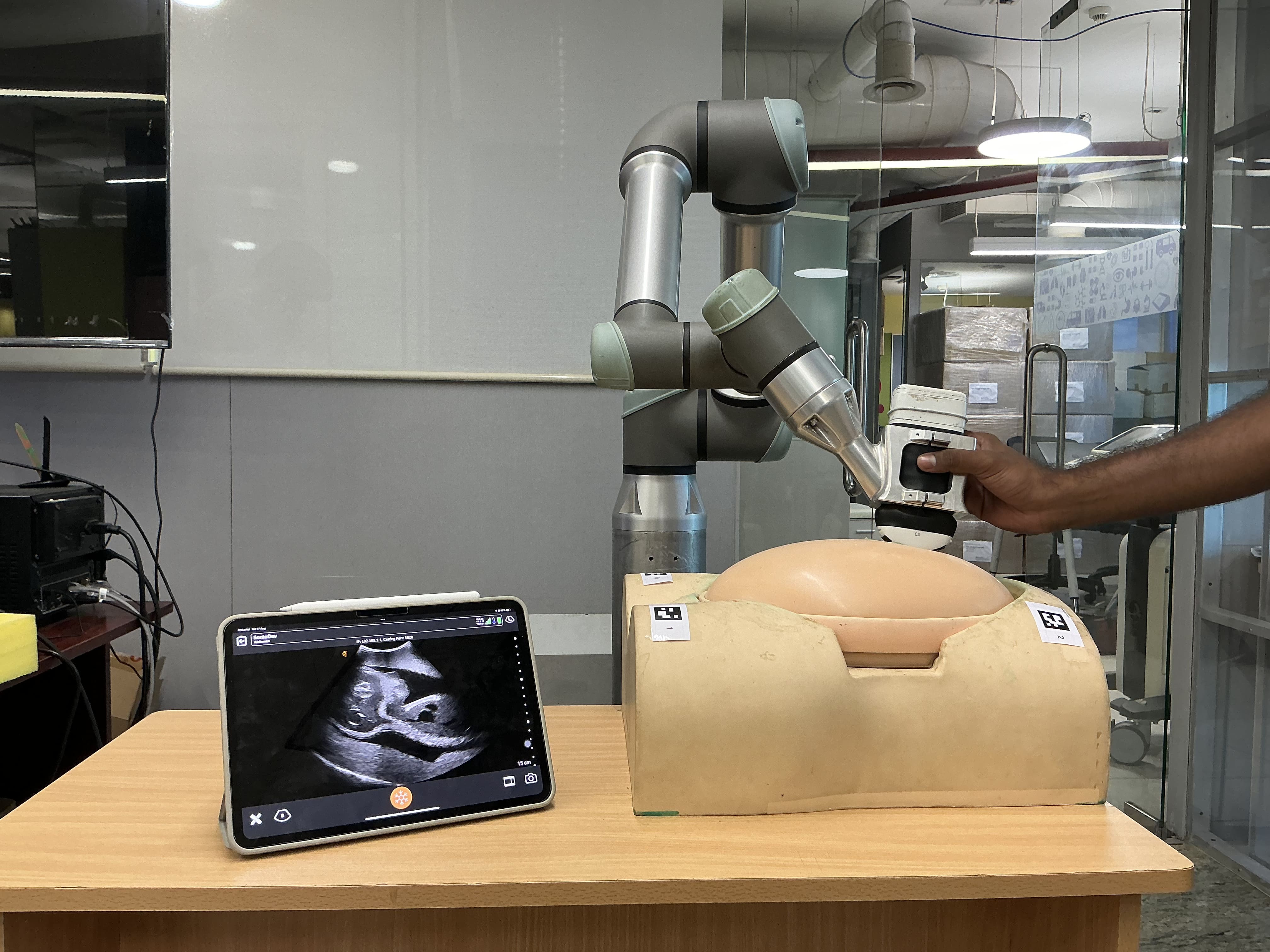
Robot motion planning for surgical interventions
Contemporary surgical robotics enhances precision in procedures like needle biopsies and minimally invasive spinal surgeries (MISS). Despite advancements, a key gap remains: the lack of motion-planning algorithms for collaborative robots in complex, multi-needle interventions. This research develops a robust, computationally efficient motion planner designed to navigate obstacle-rich surgical environments, advancing the safety and efficacy of robotic-assisted MISS.
Primary Themes:
- Serial robot modeling
- Kinematic & Velocity analysis of serial robots
- Optimal layout and workspace identification
- Collision modeling, detection, and avoidance during intraoperative surgery
- Motion planning algorithms for multi-needle insertions
- Kinematic calibration - TCP & DH parameters